
Применение цифровой визуализации, диагностики и оттисков, а также использование технологий CAD/CAM способствует усовершенствованию подходов к изготовлению стоматологических конструкций и работы с мягкими и твердыми тканями ротовой полости. Особенно важно применение вышеупомянутых усовершенствований в эндодонтической практике.

Ограничения
Несмотря на все достижения эндодонтической практики все же существуют клинические ситуации, в которых классические протоколы лечения не могут обеспечить достаточного уровня эффективности. Например, в случаях склерозирования каналов наблюдается коронально-апикальная регрессия канала, что усложняет этап идентификации устьев и траектории их проходимости. Конечно, опыт врача – это всегда залог успеха, но с учетом того, что ось канала может отклоняться от оси зуба в разных направлениях, повышается риск развития ятрогенных осложнений. В случаях выполнения оперативных эндодонтических вмешательств выбор неправильного направления остеотомии, даже в условиях реализации минимально инвазивного подхода, может спровоцировать повреждение нижнего альвеолярного нерва или перфорацию верхнечелюстного синуса.
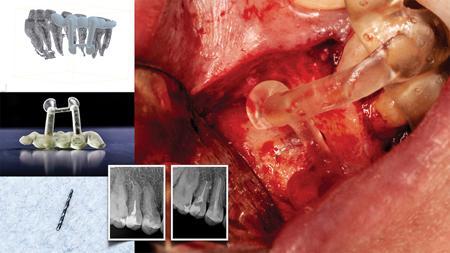
Появление методов конусно-лучевой компьютерной томографии (файлы DICOM) и 3D-печати изменило подход к планированию разных видов ятрогенных вмешательств, позволяя расширить возможности исходного этапа лечения. Полученные файлы КЛКТ-сканирования DICOM можно преобразовывать в файлы стереолитических моделей, по которых, в конечном счете, можно моделировать дизайн статических навигационных шаблонов. Последние позволяют четко контролировать ход препарирования во время формирования полости доступа или вектор остеотомии при выполнении мини-инвазивных хирургических вмешательств. Также данный подход позволяет минимизировать объем редукции как дентина, так и костной ткани в процессе лечения (фото 1a и b). Динамическая навигация позволяет имплементировать в практику новые контролируемые протоколы эндодонтического лечения. Повышая точность выполнения манипуляции и получая одномоментную реакцию приборов при изменении направления сверла, врач имеет возможность эффективно проводить препарирование полости доступа даже в условиях кальцифицированных каналов или повторного эндодонтического лечения.
Фото 1а. Статическая навигация для формирования эндодонтического доступа.

Фото 1b. Изготовления шаблона для удаления сломанного на верхушке инструмента.
Однако каждый навигационный протокол имеет свои недостатки. При реализации вмешательств «от руки» клиническое мышление врача и его «ориентация» в клинической ситуации являются ключевыми факторами успеха. Кроме того, при подобном лечении крайне важно обеспечить полную визуализацию рабочего поля и сопоставить клиническую картину с данными рентгенографии. В отдельных случаях определение хода корневого канала при реализации ятрогенного протокола вмешательства «от руки» - и вовсе является невозможным. Стереолитические шаблоны (статическая навигация) требуют выполнения компьютерной томографии со средним размером области интереса. После выполнения КЛКТ получают оттиски, отливают модели, проводят сканирование последних и сопоставляют полученные сканы с результатами КЛКТ. Можно, конечно, обойтись и без моделей, но в таких условиях обязательно использование внутриротового сканера. В случаях реализации принципов динамической навигации точность виртуального планирования эндодонтического доступа зависит от разрешения КЛКТ-аппарата. Недостатки в процессе изготовления интегрированного фидуциального стента могут привести, в конечном счете, к неспешному результату лечения.
Инновационная навигация
Динамическая навигация обеспечивается за счет контролирующей компьютерной технологии, которая анализирует данные КЛКТ-обследования. Это, по сути, то же, что использовать GPS или спутниковую навигацию, но в стоматологии. Новая компьютерная технология Trace and Place (TaP) была разработана канадской компанией ClaroNav. TaP устраняет необходимость в использовании шаблона как такового, и обеспечивает одномоментный контроль за проведением ятрогенного вмешательства. Оптическое трассирующее устройство (фото 2) контролирует движения Jaw-Tracker, оптической метки отслеживания движения, которая зафиксирована на нижней челюсти, и Drill-Tag, оптической метки отслеживания, зафиксированной на рабочем инструменте. В виртуальном режиме происходит наложение рабочего наконечника на данные, полученные в ходе КЛКТ-обследования. Высокий уровень точности технологии TaP расширяет возможности для формирования полости доступа, ограничивая объем редукции твердых тканей дентина, или кортикальной пластинки при выполнении остеотомии (пьезотом ACTEON). Ультразвуковые наконечники, используемые для ретропрепарирования корня, также могут отслеживаться динамическим программным обеспечением для навигации.
Фото 2. Оптический трассирующий сенсор регистрирует положение Jaw Tracker, Tracer-Tracker и Drill Tracker.

Планирование рабочего процесса с TaP и регистрация движений
Процесс старения человека влияет на состояние тканей пульпы и пародонта, что, в свою очередь, осложняет процесс эндодонтического лечения за счет склерозирования каналов. В таких условиях применение принципов динамической навигации является новой возможностью для эффективного решения проблем эндодонтического лечения зубов с склерозированным эндопространством.
Перед проведение лечения
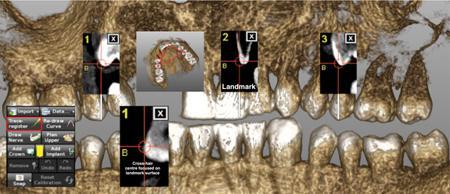
Первым этапом рабочего процесса TaP является импорт набора КЛКТ-данных пациента (в виде файла DICOM) в программное обеспечение для динамического планирования навигации. На экране отображаются потоковое видео, панорамный вид, обзорное изображение, индикатор глубины, а также щечный и мезиодистальный срезы (фото 3). В программном обеспечении планируется положение точки доступа, оси ориентации/ангуляции и глубины полости доступа. В ходе планирования микрохирургических вмешательств изучают возможный путь движения пьезотома с учетом размеров патологии костной ткани в области апекса зуба (4a-c).
Фото 3. 1) панорамный вид; 2) трехмерная реконструкция; 3) аксиальный срез; 4) щечно-язычный срез; 5) мезиодистальный срез.

Фото 4а. Планирование положения оси рабочего инструмента для препарирования кальцифицированных каналов.
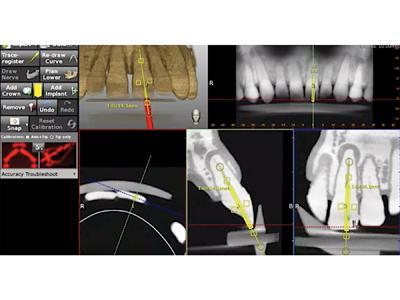
Фото 4b. Красная маркировка обозначает отклонение от запланированной оси.
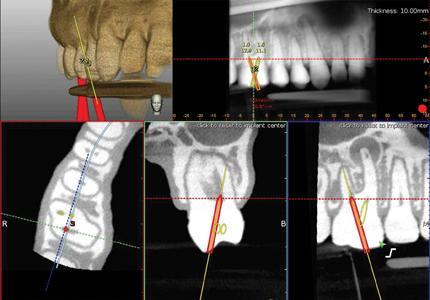
Фото 4с. Планирование процедуры остеотомии.
Планирование можно проводить в любое время до выполнения манипуляции при условии, что полученные КЛКТ-данные до сих пор являются актуальными по отношению к состоянию нынешнего стоматологического статуса пациента. Перед началом регистрации трассировки движений также выбирают от трех до шести точек (ориентиров) на доступных для визуализации зубах. Когда компьютерная мышь расположена над 3D-моделью, появляется 2D кроссекционный вид. Красный крестик проецируется в качестве ориентировочной точки по центру поверхности (фото 5). Программное обеспечение акустически сообщает врачу о возможном смещении ориентира в неправильное положение.
Фото 5. Выбор трех нелинейно расположенных ориентиров.
Регистрация трассировки
Трекер для нижней или верхней челюсти Jaw-Tracker или трекер только для верхней челюсти Head-Tracker плотно фиксируются к соответствующим анатомическим структурам (фото 6). Позиция трекера является относительно ограниченной для обеспечения высокой точности манипуляций во время проведения вмешательств. После идентификации трех ориентиров сенсор оптической трассировки отслеживает Tracer-Tag/Tracer-Tool во время его движений вокруг фидуциальных точек. Программное обеспечение демонстрирует количество точек, которые оказались совместимыми в процентном соотношении (фото 7).
Фото 6. 1) установка Jaw Tracker; 2) работа системы.
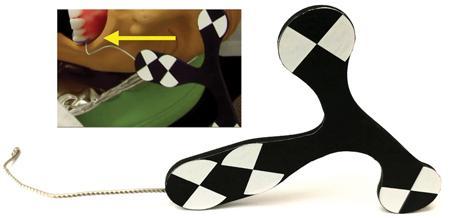
Фото 7. Калибровка Trace Tool.

Калибровка сверла
Drill-Tag крепится к наконечнику, после чего проводят калибровку оси вмешательства и кончика сверла. Сенсор оптической трассировки отслеживает положение сверла по Drill-Tag, а программное обеспечение ведёт предупреждения если Drill-Tag или Jaw-Tracker выходят за зону охвата камеры (фото 8a и b).
Фото 8а. Калибровка оси сверла и кончика инструмента.

Фото 8b. Drill Tag.

Дентоальвеолярная навигация в режиме реального времени
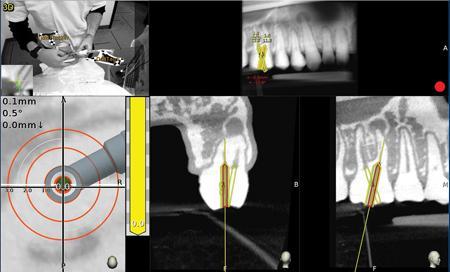
Экран навигации активируется, когда система определяет калиброванный инструмент по мере его приближения к челюсти пациента. Система целевого вида измеряет расстояние между кончиком инструмента и центральной осью определенной точки доступа, траекторией вмешательства или остеотомии. Длина центральной оси запланированной процедуры представлена центром статической белой «мишени», а конец сверла – движущимся черным крестом, который соответствует движению наконечника сверла. Направление сверла в реальном времени графически представлено в виде конуса (фото 9a и b). В ходе препарирования движения крестика и конуса демонстрируются в реальном времени. Когда конус – зеленого цвет, это обозначает, что отклонения от запланированной позиции составляют до 0,5 мм и до 3°. Когда кончик сверла достигает расстояния 1 мм до апикальной или горизонтальной границ запланированной глубины, индикатор приобретает желтый цвет.
Фото 9а. Кальцифицированный центральный резец: 1) визуализация сверла; 2) центральная ось вмешательства; 3) индикатор глубины; 4) угол между сверлом и запланированной осью.
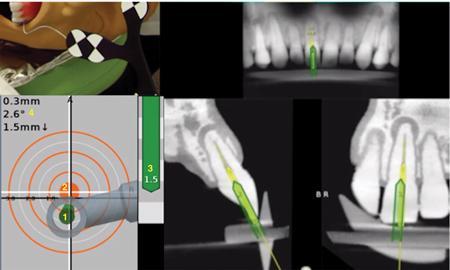
Фото 9b. Верхний моляр: планирование точки доступа.
Вывод
Динамическая навигация представляет собой дополнительные возможности для контроля выполнения разного рода ятрогенных вмешательств с использованием современных новшеств цифрового подхода. Будущее стоматологии состоит в реализации мини-инвазивных протоколов вмешательств, на что и ориентированы основные принципы динамической навигации. Конечно, имплементировать данную технологию в практику сначала будет достаточно сложно, но потом она займет свое место среди других распространенных методик стоматологического лечения. Улучшения параметров разрешения монитора, применения оптических маркеров и динамических ориентиров – все это позволит в значительной мере повысить эффективность эндодонтических вмешательств на пути замены аналоговых протоколов лечения в более успешные цифровые.
Автор: Kenneth S. Serota, DDS, MMSc
Применение цифровой визуализации, диагностики и оттисков, а также использование технологий CAD/CAM способствует усовершенствованию подходов к изготовлению стоматологических конструкций и работы с мягкими и твердыми тканями ротовой полости. Особенно важно применение вышеупомянутых усовершенствований в эндодонтической практике.
Ограничения
Несмотря на все достижения эндодонтической практики все же существуют клинические ситуации, в которых классические протоколы лечения не могут обеспечить достаточного уровня эффективности. Например, в случаях склерозирования каналов наблюдается коронально-апикальная регрессия канала, что усложняет этап идентификации устьев и траектории их проходимости. Конечно, опыт врача – это всегда залог успеха, но с учетом того, что ось канала может отклоняться от оси зуба в разных направлениях, повышается риск развития ятрогенных осложнений. В случаях выполнения оперативных эндодонтических вмешательств выбор неправильного направления остеотомии, даже в условиях реализации минимально инвазивного подхода, может спровоцировать повреждение нижнего альвеолярного нерва или перфорацию верхнечелюстного синуса.
Появление методов конусно-лучевой компьютерной томографии (файлы DICOM) и 3D-печати изменило подход к планированию разных видов ятрогенных вмешательств, позволяя расширить возможности исходного этапа лечения. Полученные файлы КЛКТ-сканирования DICOM можно преобразовывать в файлы стереолитических моделей, по которых, в конечном счете, можно моделировать дизайн статических навигационных шаблонов. Последние позволяют четко контролировать ход препарирования во время формирования полости доступа или вектор остеотомии при выполнении мини-инвазивных хирургических вмешательств. Также данный подход позволяет минимизировать объем редукции как дентина, так и костной ткани в процессе лечения (фото 1a и b). Динамическая навигация позволяет имплементировать в практику новые контролируемые протоколы эндодонтического лечения. Повышая точность выполнения манипуляции и получая одномоментную реакцию приборов при изменении направления сверла, врач имеет возможность эффективно проводить препарирование полости доступа даже в условиях кальцифицированных каналов или повторного эндодонтического лечения.
Фото 1а. Статическая навигация для формирования эндодонтического доступа.
Фото 1b. Изготовления шаблона для удаления сломанного на верхушке инструмента.
Однако каждый навигационный протокол имеет свои недостатки. При реализации вмешательств «от руки» клиническое мышление врача и его «ориентация» в клинической ситуации являются ключевыми факторами успеха. Кроме того, при подобном лечении крайне важно обеспечить полную визуализацию рабочего поля и сопоставить клиническую картину с данными рентгенографии. В отдельных случаях определение хода корневого канала при реализации ятрогенного протокола вмешательства «от руки» - и вовсе является невозможным. Стереолитические шаблоны (статическая навигация) требуют выполнения компьютерной томографии со средним размером области интереса. После выполнения КЛКТ получают оттиски, отливают модели, проводят сканирование последних и сопоставляют полученные сканы с результатами КЛКТ. Можно, конечно, обойтись и без моделей, но в таких условиях обязательно использование внутриротового сканера. В случаях реализации принципов динамической навигации точность виртуального планирования эндодонтического доступа зависит от разрешения КЛКТ-аппарата. Недостатки в процессе изготовления интегрированного фидуциального стента могут привести, в конечном счете, к неспешному результату лечения.
Инновационная навигация
Динамическая навигация обеспечивается за счет контролирующей компьютерной технологии, которая анализирует данные КЛКТ-обследования. Это, по сути, то же, что использовать GPS или спутниковую навигацию, но в стоматологии. Новая компьютерная технология Trace and Place (TaP) была разработана канадской компанией ClaroNav. TaP устраняет необходимость в использовании шаблона как такового, и обеспечивает одномоментный контроль за проведением ятрогенного вмешательства. Оптическое трассирующее устройство (фото 2) контролирует движения Jaw-Tracker, оптической метки отслеживания движения, которая зафиксирована на нижней челюсти, и Drill-Tag, оптической метки отслеживания, зафиксированной на рабочем инструменте. В виртуальном режиме происходит наложение рабочего наконечника на данные, полученные в ходе КЛКТ-обследования. Высокий уровень точности технологии TaP расширяет возможности для формирования полости доступа, ограничивая объем редукции твердых тканей дентина, или кортикальной пластинки при выполнении остеотомии (пьезотом ACTEON). Ультразвуковые наконечники, используемые для ретропрепарирования корня, также могут отслеживаться динамическим программным обеспечением для навигации.
Фото 2. Оптический трассирующий сенсор регистрирует положение Jaw Tracker, Tracer-Tracker и Drill Tracker.
Планирование рабочего процесса с TaP и регистрация движений
Процесс старения человека влияет на состояние тканей пульпы и пародонта, что, в свою очередь, осложняет процесс эндодонтического лечения за счет склерозирования каналов. В таких условиях применение принципов динамической навигации является новой возможностью для эффективного решения проблем эндодонтического лечения зубов с склерозированным эндопространством.
Перед проведение лечения
Первым этапом рабочего процесса TaP является импорт набора КЛКТ-данных пациента (в виде файла DICOM) в программное обеспечение для динамического планирования навигации. На экране отображаются потоковое видео, панорамный вид, обзорное изображение, индикатор глубины, а также щечный и мезиодистальный срезы (фото 3). В программном обеспечении планируется положение точки доступа, оси ориентации/ангуляции и глубины полости доступа. В ходе планирования микрохирургических вмешательств изучают возможный путь движения пьезотома с учетом размеров патологии костной ткани в области апекса зуба (4a-c).
Фото 3. 1) панорамный вид; 2) трехмерная реконструкция; 3) аксиальный срез; 4) щечно-язычный срез; 5) мезиодистальный срез.
Фото 4а. Планирование положения оси рабочего инструмента для препарирования кальцифицированных каналов.
Фото 4b. Красная маркировка обозначает отклонение от запланированной оси.
Фото 4с. Планирование процедуры остеотомии.
Планирование можно проводить в любое время до выполнения манипуляции при условии, что полученные КЛКТ-данные до сих пор являются актуальными по отношению к состоянию нынешнего стоматологического статуса пациента. Перед началом регистрации трассировки движений также выбирают от трех до шести точек (ориентиров) на доступных для визуализации зубах. Когда компьютерная мышь расположена над 3D-моделью, появляется 2D кроссекционный вид. Красный крестик проецируется в качестве ориентировочной точки по центру поверхности (фото 5). Программное обеспечение акустически сообщает врачу о возможном смещении ориентира в неправильное положение.
Фото 5. Выбор трех нелинейно расположенных ориентиров.
Регистрация трассировки
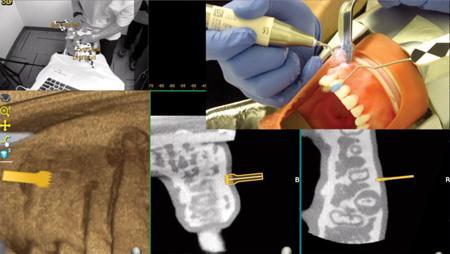
Трекер для нижней или верхней челюсти Jaw-Tracker или трекер только для верхней челюсти Head-Tracker плотно фиксируются к соответствующим анатомическим структурам (фото 6). Позиция трекера является относительно ограниченной для обеспечения высокой точности манипуляций во время проведения вмешательств. После идентификации трех ориентиров сенсор оптической трассировки отслеживает Tracer-Tag/Tracer-Tool во время его движений вокруг фидуциальных точек. Программное обеспечение демонстрирует количество точек, которые оказались совместимыми в процентном соотношении (фото 7).
Фото 6. 1) установка Jaw Tracker; 2) работа системы.
Фото 7. Калибровка Trace Tool.
Калибровка сверла
Drill-Tag крепится к наконечнику, после чего проводят калибровку оси вмешательства и кончика сверла. Сенсор оптической трассировки отслеживает положение сверла по Drill-Tag, а программное обеспечение ведёт предупреждения если Drill-Tag или Jaw-Tracker выходят за зону охвата камеры (фото 8a и b).
Фото 8а. Калибровка оси сверла и кончика инструмента.
Фото 8b. Drill Tag.
Дентоальвеолярная навигация в режиме реального времени
Экран навигации активируется, когда система определяет калиброванный инструмент по мере его приближения к челюсти пациента. Система целевого вида измеряет расстояние между кончиком инструмента и центральной осью определенной точки доступа, траекторией вмешательства или остеотомии. Длина центральной оси запланированной процедуры представлена центром статической белой «мишени», а конец сверла – движущимся черным крестом, который соответствует движению наконечника сверла. Направление сверла в реальном времени графически представлено в виде конуса (фото 9a и b). В ходе препарирования движения крестика и конуса демонстрируются в реальном времени. Когда конус – зеленого цвет, это обозначает, что отклонения от запланированной позиции составляют до 0,5 мм и до 3°. Когда кончик сверла достигает расстояния 1 мм до апикальной или горизонтальной границ запланированной глубины, индикатор приобретает желтый цвет.
Фото 9а. Кальцифицированный центральный резец: 1) визуализация сверла; 2) центральная ось вмешательства; 3) индикатор глубины; 4) угол между сверлом и запланированной осью.
Фото 9b. Верхний моляр: планирование точки доступа.
Вывод
Динамическая навигация представляет собой дополнительные возможности для контроля выполнения разного рода ятрогенных вмешательств с использованием современных новшеств цифрового подхода. Будущее стоматологии состоит в реализации мини-инвазивных протоколов вмешательств, на что и ориентированы основные принципы динамической навигации. Конечно, имплементировать данную технологию в практику сначала будет достаточно сложно, но потом она займет свое место среди других распространенных методик стоматологического лечения. Улучшения параметров разрешения монитора, применения оптических маркеров и динамических ориентиров – все это позволит в значительной мере повысить эффективность эндодонтических вмешательств на пути замены аналоговых протоколов лечения в более успешные цифровые.
Автор: Kenneth S. Serota, DDS, MMSc
Читайте также:





Статьи от брендов


























































































































































{kind=link}
{kind=link}
0 комментариев