
Прогрессивное развитие дентальной имплантации в наши дни обусловлено влиянием четырех основных открытий, а именно: (1) явление остеоинтеграции, открытое доктором Per-Ingvar Branemark; (2) внедрение компьютерной томографии (КТ) с изменением концепции имплантации на протетически направленную; (3) моделирование с использованием компьютера стереолитографических хирургических направляющих; и (4) конусно-лучевая компьютерная томография (КЛКТ), которая позволила снизить дозу радиации и позволила внедрить томографические методы исследования в частную стоматологическую практику.
С чего началась направленная хирургия
В 2000 году аппараты КЛКТ стали доступными для стоматологической практики, при этом доза облучения от таковых также была максимально снижена. Все это привело к тому, что в 2002 году врачи уже научились моделировать хирургические стереолитографические шаблоны на основе полученных томографических данных, при этом никак не компрометируя критерии радиационной безопасности пациента. Сегодня же проведение томомографического исследования, как и использование направляющих шаблонов при имплантации, – это не более чем просто стандарт лечения, от которого уже сложно отойти. В самом начале направляющие шаблоны представляли собой последовательность адаптированных паттернов, по которым проводился этап препарирования костной ткани. Шаблон ограничивал возможность проведения остеотомии в неправильном направлении или же на непредусмотренную глубину. Благодаря шаблонам удалось улучшить точность проведения имплантации почти на 50%, при этом, однако, сам протокол установки титанового винта оставался наполовину выполненным «от руки», то есть не полностью, а лишь частично контролированным, поскольку не позволял учесть трехмерной позиции имплантата. Дальнейшие подходы к модификации вариантов применения шаблонов позволили врачам добиться субмиллиметровой точности установки имплантатов, при этом контролируя его положение во всех возможных плоскостях. Учитывая возможности современных сканеров и CAD/CAM систем, имплантация стала полностью контролируемой процедурой с возможностью ее немедленной реализации как в условиях частичной, так и в условиях полной адентии. Используемые сегодня стереолитографические шаблоны именуются статическими, поскольку после их производства в плане лечения уже нельзя проводить никаких изменений, а сам процесс лечения становиться полностью контролируемым и направленным. Между тем, при неадекватном планировании и подгонке, возможно допущение ошибок на этапах изготовления и фиксации шаблонов, что приводит к их смещению во время выполнения хирургической манипуляции. С другой стороны, при не учете параметров плотности костной ткани в области отсутствующего зуба иногда приходиться изменять ангуляцию постановки титановой опоры, что, по сути, невозможно, если отталкиваться только от имеющейся позиции спроектированной в структуре шаблона. К сожалению, ошибки в планировании дизайна самого шаблона чаще всего становятся видимыми только уже на этапе непосредственного проведения процедуры имплантации.
Динамическая навигационная хирургия, она же – виртуальная хирургия, довольно широко используется в отдельных отраслях медицины, например, в челюстно-лицевой хирургии, нейрохирургии и спинальной хирургии. Использование навигационных систем при хирургических вмешательствах возможно благодаря технологиям отслеживания движений, которые также именуются микротрекерными камерами. В стоматологии использование принципов навигационной хирургии возможно благодаря возможности учета позиции имплантата относительно структуры челюсти в реальном времени. Положение сверла в структуре челюсти может контролироваться прямо во время вмешательства, что позволяет корригировать его в нужном направлении в случае необходимости (фото 1).
Фото 1. Составляющие элементы навигационной системы: (1) оптический сенсор позиционирования фиксирован на (4) ручке мобильной платформы. Стереоскопический сенсор позиционирования (4) определяет и производит триангуляционную трансформацию оптических маркеров на наконечнике (2) и челюсти (3), таким образом, обеспечивая контроль за динамическими составляющими в реальном времени.

Картирование положения верхушки сверла относительно структуры челюсти пациента, данные о которой были получены при помощи КЛКТ, обеспечивается за счет трех основных процессов: регистрации, калибровки и трекинга (фото 2). Таким образом, врач может проводить установку имплантата в строго предварительно определенную и ортопедически обоснованную позицию, что оптимизирует весь процесс реабилитации в будущем. Динамическая навигация процесса установки дентальных имплантатов по сравнению со статической характеризуется рядом определенных преимуществ: какие-либо изменения в протоколе лечения могут быть реализованы прямо во время проведения вмешательства, технология может быть использована с любой системой дентальных имплантатов, сама процедура предусматривает выполнение всех необходимых манипуляций за 1 день, а также исключает необходимость применения статических направляющих шаблонов, для изготовления которых требуются дополнительные затраты.
Фото 2. Регистрация, трекинг, калибровка – основные три этапа динамической навигации.
В конце концов врач имеет в своем арсенале инструменты для верификации и валидации точности установки имплантатов в реальном времени. Поэтому основная цель данной статьи состоит в том, чтобы ознакомить читателя с основными аспектами динамической навигационной технологии и возможностями ее использования в стоматологии.
Обзор навигационной системы
Динамические навигационные системы отслеживают положение сверла при проведении препарирования костной ткани, и картируют его на результатах КЛКТ-сканирования, обеспечивая контроль положения остеотомического канала в реальном времени. Когда кончик сверла приближается к предварительно запланированному месту установки имплантата, система обеспечивает перекрестное отображение, позволяя хирурги в полной мере добиться предварительно спланированной позиции, регулируя ориентацию сверла и глубину его введения. Под аналогичным контролем можно проводить и этап установки самого дентального имплантата. Представленная в данной статье динамическая навигационная система является системой Navident (ClaroNav). Ее аналоги включают X-Guide Dynamic 3D Navigation (X-Nav), Image Guided Implant (IGI) Dentistry System (Image Navigation), YOMI (Neocis), Inliant (Navigate Surgical).
Динамическая навигационная система Navident состоит из пяти основных компонентов (фото 1):
- Компьютер с системным программным обеспечением, благодаря которому удается добиться интеграции между планированием и навигационным функционалом.
- Аттачмент для наконечника, который состоит из универсального адаптера для крепления на наконечнике и оптически маркированного пластикового компонента, называемого «меткой сверла».
- Аттачмент для челюсти, который состоит из термопластического стента, при этом последний фиксируют непосредственно на зубном ряду пациента вместе с ручкой ретейнера, которая продолжается от тела ретейнера. Фидуциальный маркер, прикрепленный к ретейнеру-фиксатору, играет роль КТ-маркера и позволяет проводить пространственную регистрацию челюсти пациента относительно положения зафиксированного аттачмента.
- Оптический датчик позиционирования (микронная камера-трекер), которая регистрирует визуальные паттерны на аттачменте наконечника и челюсти, и передает данные об их относительной позиции прямо в структуру программного обеспечения. Это позволяет хирургу интраоперационно проверять точность позиционирования сверла относительно костного ложа челюсти.
- Компактная мобильная тележка (не показана на фото 1), на которой располагаются ноутбук и позиционируется оптический датчик, который находится над пациентом.
Рабочий процесс: стент, скан, план и позиция.
Описанная в данной статье навигационная система характеризуется специфическим цифровым рабочим процессом, который включает четыре этапа:
Стент - термопластичный фиксатор-ретейнер, который устанавливается на зубной ряд, и остается там до полного затвердения, после чего изымается и обрезается так, чтобы обеспечить доступ к области имплантации. Ручка ретейнера сделана из того же термопластического материала и включает фиксирующую плоскость, которая соединена с КТ-маркером через винт. КТ-маркер содержит алюминиевую фидуциарную сердцевину, которую можно легко идентифицировать на КЛКТ. По сути, фиксирующая плоскость и является той референтной позицией, относительно которой анализируют КЛКТ-данные и проводятся автоматические расчеты пространственного положения челюсти и сверла. При соединении винтом КТ-маркер жестко соединяется с ретейнером-фиксатором. Термопластический ретейнер и ручка соединяются посредством адгезивного клея (фото 3).
Фото 3. Стент приготовлен для получения КЛКТ-скана: индивидуализированный термопластический ретейнер соединен с ручкой и фиксирующей плоскостью, КТ-маркер прикручен при помощи винта.

КТ- маркер, термопластичный стент и ручка ретейнера с фиксируемой плоскостью соединены вместе для проверки точности установки дентального имплантата. После этого проводиться сканирование челюсти при помощи КЛКТ-аппарата (фото 3). После получения КЛКТ-данных в формате Digital Imaging Communication in Medicine (DICOM), они импортируются в навигационную систему посредством прямой передачи с использованием локальной сети. Регистрация фидуциального изображения в КТ выполняется автоматически, после чего проверяется пользователем. STL-файл зубного ряда или восковой репродукции также импортируется после сканирования для комплексной интеграции данных и планирования будущего вмешательства (фото 4).
Фото 4. Интерфейс программного обеспечения. Импорт STL-файла после сканирования челюстей. На аксиальном срезе визуализируется фидуциарный маркер. В области зубов 8 и 9 были смоделированы виртуальные зубы, отталкиваясь от позиции которых определяли необходимое положение имплантатов.
Сначала проводится виртуальное позиционирование будущих реставраций, после чего, исходя из их положения, определяется необходимое направление имплантатов. Несмотря на предварительное планирование, при необходимости у хирурга есть возможность модифицировать протокол лечения прямо во время выполнения ятрогенного вмешательства при сопутствующих для этого условиях.
На экране компьютера отображается положение референтной плоскости в полости рта пациента. Индивидуализированный термопластический стент присоединяют к головке оптического маркера, который устанавливают на месте КТ-маркера. Фиксация оптического маркера к плоскости плеча ручки ретейнера проводиться посредством фиксирующего винта. Второй компонент оптического маркера (маркер сверления) присоединяется к наконечнику, проводится калибровка оси препарирования, а также калибровка первого сверла, используемого при остеотомии (фото 5).
Фото 5. Калибровка сверла для остеотомии перед операцией.

В ходе препарирования кости проводится калибровка каждого используемого сверла, после чего проверятся точность выполнения каждого из этапов остеотомии. Препарирование кости проводиться под контролем динамической навигации. Движения наконечника контролируются относительно позиции пациента. Во время остеотомии оператор имеет возможность визуализировать аксиальные, панорамные и кросс-секционные изображения, на которых в реальном времени отображен процесс погружения сверла. Благодаря принципу «контрольной мишени», врач имеет возможность установить разбежность между центральной осью и верхушкой сверла, углом наклона наконечника относительно центральной продольной оси и измерять расстояние от верхушки сверла до наиболее апикальной точки запланированной глубины остеотомии.
Фото 6. Визуализация в форме мишени для определения отклонений объективной позиции и направления остеотомии от запланированной.
Причины ошибок при использовании направляющих шаблонов
Ошибки позиционирования сверла относительно положения, определенного на КТ-изображении, связаны с небольшими погрешностями применения принципов навигационной хирургии или же с проблемами использования данной технологии в целом (например, ошибки, допущенные при производстве элементов системы, дисторсия параметров стента, неточная калибровка, движения пациента во время КТ-сканирования, нестабильная фиксация референтной плоскости в полости рта, изгиб плеча или коннекторов во время проведения хирургического вмешательства). Поэтому врачи должны уделять достаточно внимания для минимизации риска возникновения подобных ошибок в процессе лечения. Несмотря на то, что навигационная система характеризуется уникальным уровнем точности, контроль процесса самим хирургом остается не до конца полным и зависит от возможности врача правильно направлять наконечник и сверло. Проблемы визуального контроля в стрессовых условиях проведения операции часто значительно влияют на точность установки дентальных имплантатов. Но при работе без статических шаблонов или навигационной системы риск развития ятрогенной ошибки возрастает в несколько раз, что еще больше компрометирует будущий результат лечения стоматологического пациента.
Клинический случай
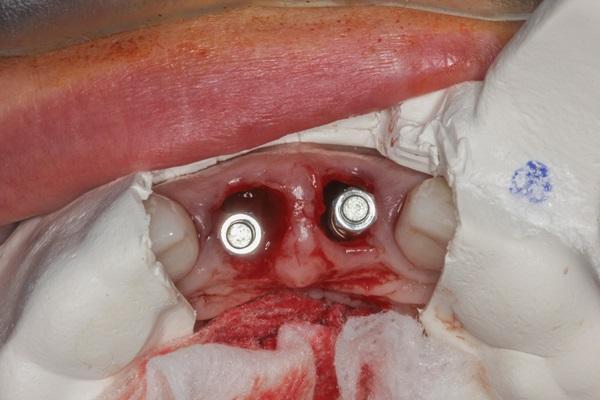
29-летняя пациентка обратилась за стоматологической помощью по поводу проблем с зубами № 8 и № 9. Зубы демонстрировали признаки перелома в области свободного десневого края и наличие уже склерозированной пульпы зуба (фото 7-8). В анамнезе пациентки значились гастроэзофагеальная рефлюксная болезнь (ГЭРБ), мигрени, нарколепсии, синдром гиперактивности с дефицитом внимания (СГДС) и депрессия. Каких-либо аллергий на медицинские препараты не отмечалось. После осмотра у пародонтолога пациентке был изготовлен термопластический ретейнер с ручкой и фидуциарным маркером (КТ-маркер), прикрепленным к фиксирующей пластине. Особое внимание было уделено обеспечению плотности прилегания термопластичного стента. После КЛКТ-сканирования области верхней челюсти (CS 9300, Carestream Dental) полученные DICOM-данные были экспортированы в программное обеспечение для дальнейшего планирования. Операция проводилась под местной анестезией. Термопластичный ретейнер фиксировали на оставшихся собственных зубах пациентки и проверяли его стабильность. После атравматического удаления зубов № 8 и №9 врач проводил оценку интактного состояния щечной костной пластинки лунки. Этап остеотомии и немедленная установка имплантата проводились с использованием динамической навигационной системы. Таким образом, было установлено два имплантата размером 3,6 мм х 9 мм (Astra Tech EV, Dentsply Sirona). Головки SmartPegs (Osstell) были прикреплены к имплантатам для картирования траектории позиционирования винтов. После установки титановых опор для заполнения щели между поверхностью винта и стенкой костной лунки использовали неорганический костный трансплантат (Bio-Oss, Geistlich Pharma). На финальном этапе пациентке зафиксировали формирователи десен (фото 9-10) и установили временный съемный протез. После установки имплантатов проводили дополнительную процедуру КЛКТ-сканирования, и сравнивали запланированное положение винтов с полученным (фото 11).
Фото 7. Вид зубов пациента до лечения.

Фото 8. Рентгенограмма области проблемных зубов.

Фото 9. Головки "Smart pegs” были установлены для регистрации траектории позиционирования имплантатов.
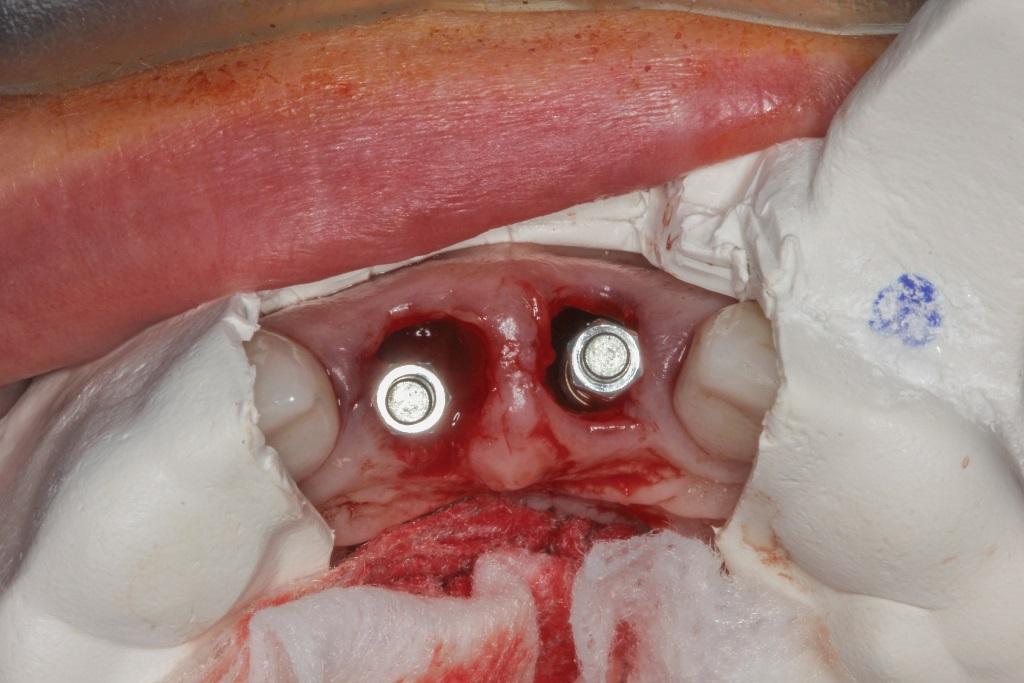
Фото 10. Установка формирователей десен после аугментации области имплантации посредством аллогенного трансплантата.
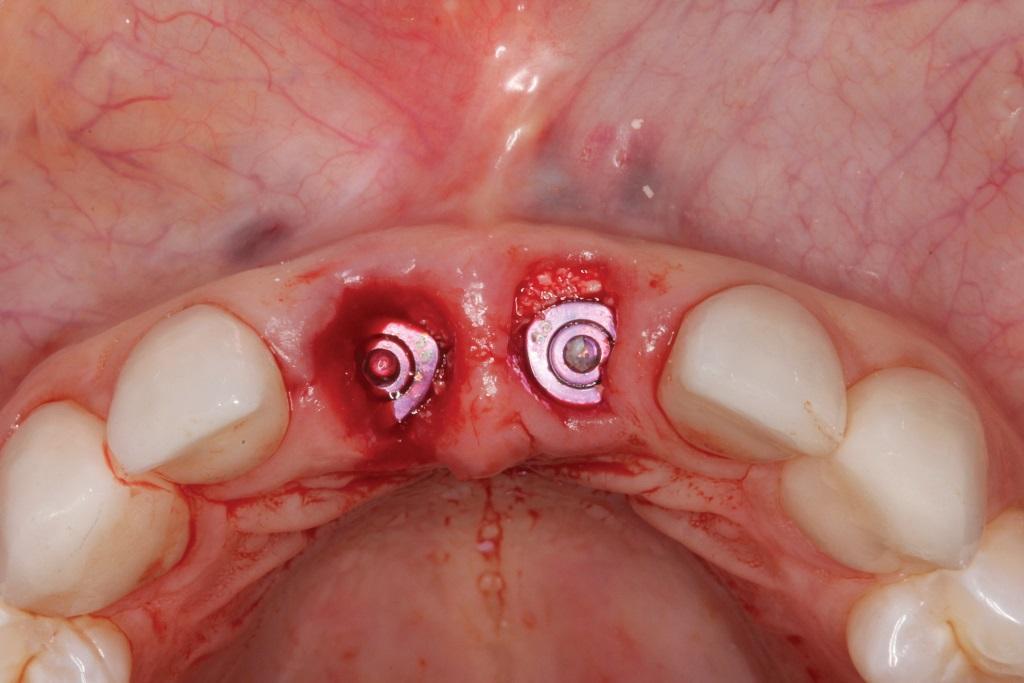
Фото 11. Сравнение запланированной и достигнутой позиций имплантатов.
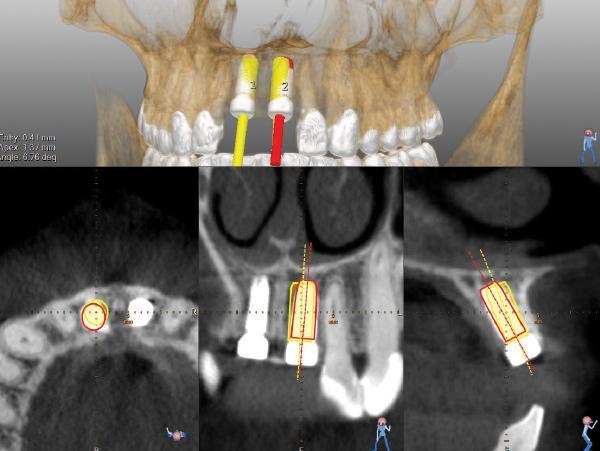
Результаты анализа были следующими: отклонения точки введения от начальной позиции в области зуба №8 составляло 0,13 мм, а в области зуба № 9 – 0,41 мм; угловая девиация достигала 4,3 градуса в области зуба № 8 и 6,76 градуса в области зуба № 9; отклонение показателей глубины установки имплантата отличалось от запланированного на 1,10 мм в области зуба № 8 и на 1,37 мм в области зуба № 9. Через 3 месяца после достижения осстеоинтеграции имплантатов были зафиксированы новые временные конструкции для формирования адекватного профиля мягких тканей. Окончательные протетические конструкции устанавливали через 6 месяцев после установки имплантатов (фото 12).
Фото 12. Вид после фиксации окончательных реставраций.

Обсуждение
Технологии визуализации плотно внедрились в имплантологическую отрасль, и привели к повышению точности установки дентальных имплантатов, а значит – и к повышению прогнозируемости общих результатов лечения. Проведенный систематический обзор показал, что использование статических направляющих шаблонов, изготовленных по предварительно полученным КТ-данным, провоцирует отклонения позиции титановых опор во время установки в среднем на 1 мм и не более чем на 5 градусов относительно запланированного положения. Однако данные другого систематического обзора указывают на гораздо больший уровень отклонений – до 7,5 мм в области точки введения имплантата и отклонение более чем на 15° от спланированных параметров ангуляции. Применение статических направляющих шаблонов, несмотря на все преимущества, чревато вероятностью развития ошибок на этапах планирования и реализации ятрогенных вмешательств. В условиях ограниченного открывания рта и при небольших размерах дефектов в структуре зубного ряда возможности для использования стереолитографических шаблонов также являются ограниченными. Подобные ограничения легко компенсировать при реализации принципов динамического навигационного контроля. Большинство ошибок в случаях применения статических шаблонов «всплывают» уже на этапе протезирования. Это и не странно, ведь такие шаблоны учитывают лишь необходимую позицию имплантата, но не ориентацию будущей протетической реставрации. Динамическая навигация в реальном времени позволяет определить точность проведения процедур остеотомии и установки дентального имплантата. Учитывая непосредственный характер контроля, врач может модифицировать протокол вмешательства прямо во время проведения манипуляции. Ведь динамическая навигация никоим образом не ограничивает возможности для визуализации рабочего поля, и, если в ходе операции определенные условия исключают возможность достижения запланированной позиции имплантата, то таковую можно тут же несколько изменить и адаптировать к существующим ограничениям.
В описанном выше клиническом случае, когда авторы данной статьи только обучались протоколу работы с динамической навигацией в ходе хирургического вмешательства, отклонения от запланированной позиции имплантатов составляли 0,13 мм и 0,41 мм по длине и 4,3 и 6,76 градусов по ангуляции в области зубов №8 и №9 соответственно.
Block и коллеги утверждают, что динамическая навигация позволяет добиться более точного позиционирования имплантатов по сравнению с обычными стереолитографическими шаблонами, но для достижения клинически более эффективных результатов врачу нужно выполнить не менее 20 установок имплантатов по вышеописанному алгоритму. Такого количества клинических случаев вполне достаточно для определенного уровня мастерства, который в дальнейшем будет только совершенствоваться. Интересно, что в других медицинских отраслях для того, чтобы улучшить свой клинический опыт врачу требуется провести ту же манипуляцию как минимум 60, а то и 500 раз, в зависимости от сложности работы с новыми технологиями. Как и в случаях со статическими шаблонами, точность и эффективность применения принципов динамической навигации напрямую зависит от полноты планирования операции и объема предварительного опыта врача.
В недавней публикации Stefanelli и коллег были представлены данные о результатах установки 231 имплантата в области резидуальных костных гребней без сепарации лоскутов или же при минимальном их смещении с использованием принципов динамической навигации. Все манипуляции проводились одним хирургом, из 89 прооперированных челюстей 28 были полностью беззубыми. Средний показатель отклонения положения имплантатов от предварительно спланированного составлял 0,71 (0,40) мм относительно точки введения (в латеральном направлении), и около 1 (0,49) мм относительно глубины введения винта. Средний показатель отклонения в градусах составлял 1,62-2,26 градусов. Точность позиционирования имплантатов у пациентов с частичной адентией при использовании статических шаблонов была практически такой же. Статически доказуемой разницы в отклонениях при позиционировании имплантатов в разных секстантах челюсти обнаружено не было. Но что самое интересное, точность установки имплантата со временем использования навигационной системы прогрессивно повышалась, и при анализе уже последних 50 установленных винтов уровни девиации положения составляли 0,59-0,85 мм и 1,98 градусов, в то время как при установке первых 50 опор данные показатели составляли 0,94-1,19 мм и 3,48 градуса.
Хотя в данной статье описан опыт применения фидуциарного маркера и термопластичного стента, в будущем динамическую навигацию по положению имплантата планируется проводить при помощи технологии трековой регистрации (ТР) с картированием. ТР позволяет использовать зубы пациента или уже установленные дентальные имплантаты как собственные фидуциарные маркеры для их интеграции в структуру полученных КЛКТ-изображений. Таким образом удастся избежать необходимости использования термопластического стента или специального КЛКТ-сканирования с искусственным специально адаптированным металлическим маркером. Диагностическая КЛКТ-визуализация может использоваться не только для планирования вмешательства и навигации во время его выполнения, но также и для оптимизации процесса документооборота пациентов. Проблемой остается трекер челюсти, который должен регистрировать ее положение во время операции, а значит постоянно должен быть зафиксирован поблизости к области вмешательства. Учитывая, что верхняя челюсть является неподвижной, маркер для регистрации ее положения можно внедрить в структуру специальных очков, которые, находясь в области переносицы, позволяют точно определить позицию челюсти относительно черепа, и тут же передавать ее в программное обеспечение. Проблемной остается нижняя челюсть: учитывая ее подвижность, маркер-трекер нужно фиксировать у самой челюсти или к отдельным нижним зубам. Технология ТР позволит использовать с этой целью трекер, прикрепленный гибкой проволокой из нержавеющей стали и композитным материалом непосредственно к зубам пациента.
Таким образом, протокол навигационной хирургии станет настолько простым, что начнет все больше внедряться в ежедневную клиническую практику. Несмотря на то, что динамическая навигация в имплантологии только начинает развиваться, она уже характеризуется набором преимуществ по сравнению с использованием обычных статических направляющих шаблонов. В процессе будущих контролированных и рандомизированных исследований удастся более детально уточнить все параметры эффективности навигационной имплантологической хирургии. Кроме того, применение принципов динамической навигации также позволяет расширить базу медико-правовой документации врача, и модифицировать лечение в сторону протетически направленного подхода. Все это обеспечивается за счет возможности системы записывать и сохранять данные процесса имплантации в форме фото и видеофайлов. Несмотря на это, применение новых технологий не исключает необходимости реализации базовых биологических принципов в имплантологии с учетом специфики процесса осстеоинтеграции имплантатов и заживления мягких и твердых тканей после хирургического вмешательства.
Заключение
Многие факторы способствуют повышению успешности результатов имплантации, и среди них достижение необходимой трехмерной позиции имплантата является одним из наиболее ключевых. Динамическая навигация является инновационным подходом, который базируется на использовании КЛКТ-данных и обеспечивает возможности для контроля точности позиционирования внутрикостной титановой опоры в реальном времени, при котором врач может адаптировать хирургической протокол с учетом особенностей каждой отдельной клинической ситуации.
Авторы:
George A. Mandelaris, DDS, MS
Luigi V. Stefanelli, DDS, PhD
Bradley S. DeGroot, DDS, MS
Производители:
Kodak (Carestream Dental), Geistlich Pharma, Osstell, Astra Tech
Прогрессивное развитие дентальной имплантации в наши дни обусловлено влиянием четырех основных открытий, а именно: (1) явление остеоинтеграции, открытое доктором Per-Ingvar Branemark; (2) внедрение компьютерной томографии (КТ) с изменением концепции имплантации на протетически направленную; (3) моделирование с использованием компьютера стереолитографических хирургических направляющих; и (4) конусно-лучевая компьютерная томография (КЛКТ), которая позволила снизить дозу радиации и позволила внедрить томографические методы исследования в частную стоматологическую практику.
С чего началась направленная хирургия
В 2000 году аппараты КЛКТ стали доступными для стоматологической практики, при этом доза облучения от таковых также была максимально снижена. Все это привело к тому, что в 2002 году врачи уже научились моделировать хирургические стереолитографические шаблоны на основе полученных томографических данных, при этом никак не компрометируя критерии радиационной безопасности пациента. Сегодня же проведение томомографического исследования, как и использование направляющих шаблонов при имплантации, – это не более чем просто стандарт лечения, от которого уже сложно отойти. В самом начале направляющие шаблоны представляли собой последовательность адаптированных паттернов, по которым проводился этап препарирования костной ткани. Шаблон ограничивал возможность проведения остеотомии в неправильном направлении или же на непредусмотренную глубину. Благодаря шаблонам удалось улучшить точность проведения имплантации почти на 50%, при этом, однако, сам протокол установки титанового винта оставался наполовину выполненным «от руки», то есть не полностью, а лишь частично контролированным, поскольку не позволял учесть трехмерной позиции имплантата. Дальнейшие подходы к модификации вариантов применения шаблонов позволили врачам добиться субмиллиметровой точности установки имплантатов, при этом контролируя его положение во всех возможных плоскостях. Учитывая возможности современных сканеров и CAD/CAM систем, имплантация стала полностью контролируемой процедурой с возможностью ее немедленной реализации как в условиях частичной, так и в условиях полной адентии. Используемые сегодня стереолитографические шаблоны именуются статическими, поскольку после их производства в плане лечения уже нельзя проводить никаких изменений, а сам процесс лечения становиться полностью контролируемым и направленным. Между тем, при неадекватном планировании и подгонке, возможно допущение ошибок на этапах изготовления и фиксации шаблонов, что приводит к их смещению во время выполнения хирургической манипуляции. С другой стороны, при не учете параметров плотности костной ткани в области отсутствующего зуба иногда приходиться изменять ангуляцию постановки титановой опоры, что, по сути, невозможно, если отталкиваться только от имеющейся позиции спроектированной в структуре шаблона. К сожалению, ошибки в планировании дизайна самого шаблона чаще всего становятся видимыми только уже на этапе непосредственного проведения процедуры имплантации.
Динамическая навигационная хирургия, она же – виртуальная хирургия, довольно широко используется в отдельных отраслях медицины, например, в челюстно-лицевой хирургии, нейрохирургии и спинальной хирургии. Использование навигационных систем при хирургических вмешательствах возможно благодаря технологиям отслеживания движений, которые также именуются микротрекерными камерами. В стоматологии использование принципов навигационной хирургии возможно благодаря возможности учета позиции имплантата относительно структуры челюсти в реальном времени. Положение сверла в структуре челюсти может контролироваться прямо во время вмешательства, что позволяет корригировать его в нужном направлении в случае необходимости (фото 1).
Фото 1. Составляющие элементы навигационной системы: (1) оптический сенсор позиционирования фиксирован на (4) ручке мобильной платформы. Стереоскопический сенсор позиционирования (4) определяет и производит триангуляционную трансформацию оптических маркеров на наконечнике (2) и челюсти (3), таким образом, обеспечивая контроль за динамическими составляющими в реальном времени.
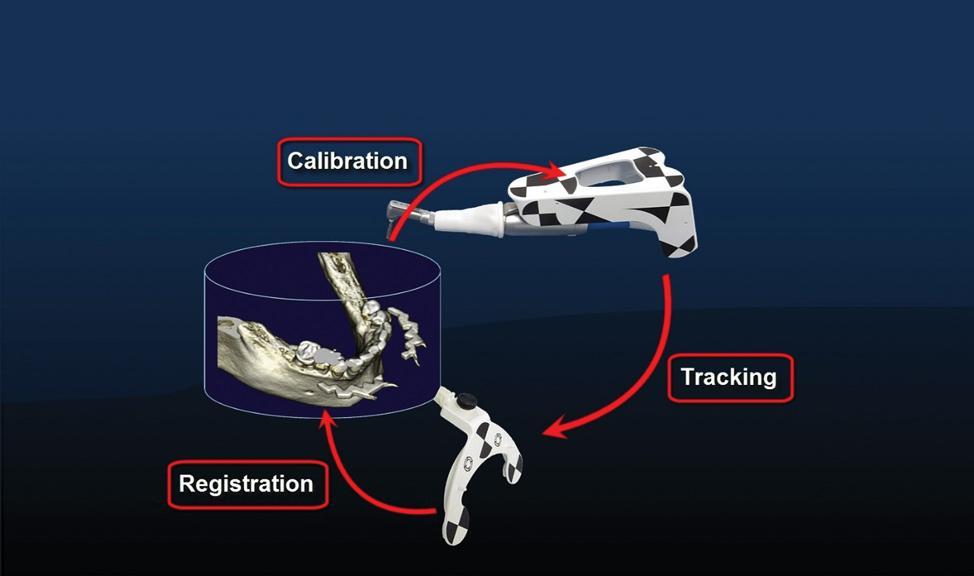
Картирование положения верхушки сверла относительно структуры челюсти пациента, данные о которой были получены при помощи КЛКТ, обеспечивается за счет трех основных процессов: регистрации, калибровки и трекинга (фото 2). Таким образом, врач может проводить установку имплантата в строго предварительно определенную и ортопедически обоснованную позицию, что оптимизирует весь процесс реабилитации в будущем. Динамическая навигация процесса установки дентальных имплантатов по сравнению со статической характеризуется рядом определенных преимуществ: какие-либо изменения в протоколе лечения могут быть реализованы прямо во время проведения вмешательства, технология может быть использована с любой системой дентальных имплантатов, сама процедура предусматривает выполнение всех необходимых манипуляций за 1 день, а также исключает необходимость применения статических направляющих шаблонов, для изготовления которых требуются дополнительные затраты.
Фото 2. Регистрация, трекинг, калибровка – основные три этапа динамической навигации.
В конце концов врач имеет в своем арсенале инструменты для верификации и валидации точности установки имплантатов в реальном времени. Поэтому основная цель данной статьи состоит в том, чтобы ознакомить читателя с основными аспектами динамической навигационной технологии и возможностями ее использования в стоматологии.
Обзор навигационной системы
Динамические навигационные системы отслеживают положение сверла при проведении препарирования костной ткани, и картируют его на результатах КЛКТ-сканирования, обеспечивая контроль положения остеотомического канала в реальном времени. Когда кончик сверла приближается к предварительно запланированному месту установки имплантата, система обеспечивает перекрестное отображение, позволяя хирурги в полной мере добиться предварительно спланированной позиции, регулируя ориентацию сверла и глубину его введения. Под аналогичным контролем можно проводить и этап установки самого дентального имплантата. Представленная в данной статье динамическая навигационная система является системой Navident (ClaroNav). Ее аналоги включают X-Guide Dynamic 3D Navigation (X-Nav), Image Guided Implant (IGI) Dentistry System (Image Navigation), YOMI (Neocis), Inliant (Navigate Surgical).
Динамическая навигационная система Navident состоит из пяти основных компонентов (фото 1):
- Компьютер с системным программным обеспечением, благодаря которому удается добиться интеграции между планированием и навигационным функционалом.
- Аттачмент для наконечника, который состоит из универсального адаптера для крепления на наконечнике и оптически маркированного пластикового компонента, называемого «меткой сверла».
- Аттачмент для челюсти, который состоит из термопластического стента, при этом последний фиксируют непосредственно на зубном ряду пациента вместе с ручкой ретейнера, которая продолжается от тела ретейнера. Фидуциальный маркер, прикрепленный к ретейнеру-фиксатору, играет роль КТ-маркера и позволяет проводить пространственную регистрацию челюсти пациента относительно положения зафиксированного аттачмента.
- Оптический датчик позиционирования (микронная камера-трекер), которая регистрирует визуальные паттерны на аттачменте наконечника и челюсти, и передает данные об их относительной позиции прямо в структуру программного обеспечения. Это позволяет хирургу интраоперационно проверять точность позиционирования сверла относительно костного ложа челюсти.
- Компактная мобильная тележка (не показана на фото 1), на которой располагаются ноутбук и позиционируется оптический датчик, который находится над пациентом.
Рабочий процесс: стент, скан, план и позиция.
Описанная в данной статье навигационная система характеризуется специфическим цифровым рабочим процессом, который включает четыре этапа:
Стент - термопластичный фиксатор-ретейнер, который устанавливается на зубной ряд, и остается там до полного затвердения, после чего изымается и обрезается так, чтобы обеспечить доступ к области имплантации. Ручка ретейнера сделана из того же термопластического материала и включает фиксирующую плоскость, которая соединена с КТ-маркером через винт. КТ-маркер содержит алюминиевую фидуциарную сердцевину, которую можно легко идентифицировать на КЛКТ. По сути, фиксирующая плоскость и является той референтной позицией, относительно которой анализируют КЛКТ-данные и проводятся автоматические расчеты пространственного положения челюсти и сверла. При соединении винтом КТ-маркер жестко соединяется с ретейнером-фиксатором. Термопластический ретейнер и ручка соединяются посредством адгезивного клея (фото 3).
Фото 3. Стент приготовлен для получения КЛКТ-скана: индивидуализированный термопластический ретейнер соединен с ручкой и фиксирующей плоскостью, КТ-маркер прикручен при помощи винта.
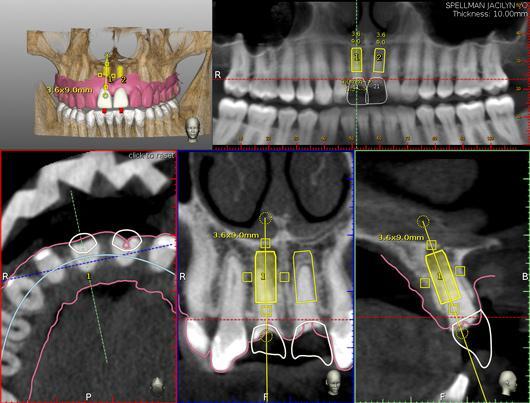
КТ- маркер, термопластичный стент и ручка ретейнера с фиксируемой плоскостью соединены вместе для проверки точности установки дентального имплантата. После этого проводиться сканирование челюсти при помощи КЛКТ-аппарата (фото 3). После получения КЛКТ-данных в формате Digital Imaging Communication in Medicine (DICOM), они импортируются в навигационную систему посредством прямой передачи с использованием локальной сети. Регистрация фидуциального изображения в КТ выполняется автоматически, после чего проверяется пользователем. STL-файл зубного ряда или восковой репродукции также импортируется после сканирования для комплексной интеграции данных и планирования будущего вмешательства (фото 4).
Фото 4. Интерфейс программного обеспечения. Импорт STL-файла после сканирования челюстей. На аксиальном срезе визуализируется фидуциарный маркер. В области зубов 8 и 9 были смоделированы виртуальные зубы, отталкиваясь от позиции которых определяли необходимое положение имплантатов.
Сначала проводится виртуальное позиционирование будущих реставраций, после чего, исходя из их положения, определяется необходимое направление имплантатов. Несмотря на предварительное планирование, при необходимости у хирурга есть возможность модифицировать протокол лечения прямо во время выполнения ятрогенного вмешательства при сопутствующих для этого условиях.
На экране компьютера отображается положение референтной плоскости в полости рта пациента. Индивидуализированный термопластический стент присоединяют к головке оптического маркера, который устанавливают на месте КТ-маркера. Фиксация оптического маркера к плоскости плеча ручки ретейнера проводиться посредством фиксирующего винта. Второй компонент оптического маркера (маркер сверления) присоединяется к наконечнику, проводится калибровка оси препарирования, а также калибровка первого сверла, используемого при остеотомии (фото 5).
Фото 5. Калибровка сверла для остеотомии перед операцией.
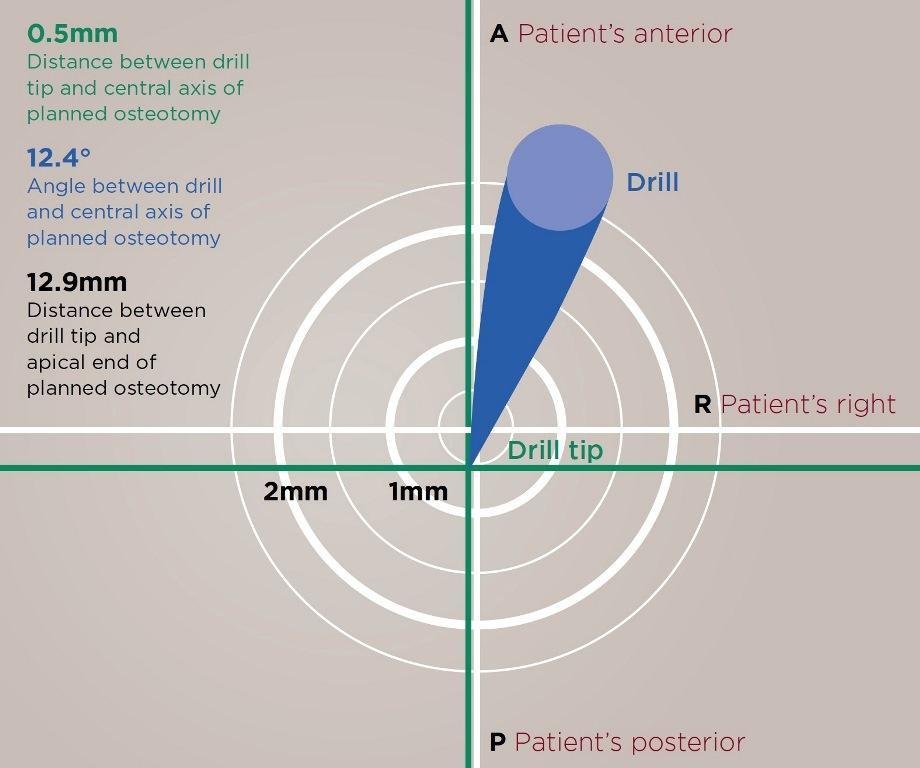
В ходе препарирования кости проводится калибровка каждого используемого сверла, после чего проверятся точность выполнения каждого из этапов остеотомии. Препарирование кости проводиться под контролем динамической навигации. Движения наконечника контролируются относительно позиции пациента. Во время остеотомии оператор имеет возможность визуализировать аксиальные, панорамные и кросс-секционные изображения, на которых в реальном времени отображен процесс погружения сверла. Благодаря принципу «контрольной мишени», врач имеет возможность установить разбежность между центральной осью и верхушкой сверла, углом наклона наконечника относительно центральной продольной оси и измерять расстояние от верхушки сверла до наиболее апикальной точки запланированной глубины остеотомии.
Фото 6. Визуализация в форме мишени для определения отклонений объективной позиции и направления остеотомии от запланированной.
Причины ошибок при использовании направляющих шаблонов
Ошибки позиционирования сверла относительно положения, определенного на КТ-изображении, связаны с небольшими погрешностями применения принципов навигационной хирургии или же с проблемами использования данной технологии в целом (например, ошибки, допущенные при производстве элементов системы, дисторсия параметров стента, неточная калибровка, движения пациента во время КТ-сканирования, нестабильная фиксация референтной плоскости в полости рта, изгиб плеча или коннекторов во время проведения хирургического вмешательства). Поэтому врачи должны уделять достаточно внимания для минимизации риска возникновения подобных ошибок в процессе лечения. Несмотря на то, что навигационная система характеризуется уникальным уровнем точности, контроль процесса самим хирургом остается не до конца полным и зависит от возможности врача правильно направлять наконечник и сверло. Проблемы визуального контроля в стрессовых условиях проведения операции часто значительно влияют на точность установки дентальных имплантатов. Но при работе без статических шаблонов или навигационной системы риск развития ятрогенной ошибки возрастает в несколько раз, что еще больше компрометирует будущий результат лечения стоматологического пациента.
Клинический случай
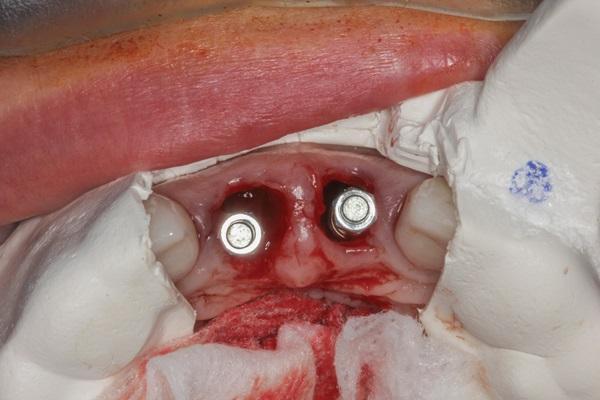
29-летняя пациентка обратилась за стоматологической помощью по поводу проблем с зубами № 8 и № 9. Зубы демонстрировали признаки перелома в области свободного десневого края и наличие уже склерозированной пульпы зуба (фото 7-8). В анамнезе пациентки значились гастроэзофагеальная рефлюксная болезнь (ГЭРБ), мигрени, нарколепсии, синдром гиперактивности с дефицитом внимания (СГДС) и депрессия. Каких-либо аллергий на медицинские препараты не отмечалось. После осмотра у пародонтолога пациентке был изготовлен термопластический ретейнер с ручкой и фидуциарным маркером (КТ-маркер), прикрепленным к фиксирующей пластине. Особое внимание было уделено обеспечению плотности прилегания термопластичного стента. После КЛКТ-сканирования области верхней челюсти (CS 9300, Carestream Dental) полученные DICOM-данные были экспортированы в программное обеспечение для дальнейшего планирования. Операция проводилась под местной анестезией. Термопластичный ретейнер фиксировали на оставшихся собственных зубах пациентки и проверяли его стабильность. После атравматического удаления зубов № 8 и №9 врач проводил оценку интактного состояния щечной костной пластинки лунки. Этап остеотомии и немедленная установка имплантата проводились с использованием динамической навигационной системы. Таким образом, было установлено два имплантата размером 3,6 мм х 9 мм (Astra Tech EV, Dentsply Sirona). Головки SmartPegs (Osstell) были прикреплены к имплантатам для картирования траектории позиционирования винтов. После установки титановых опор для заполнения щели между поверхностью винта и стенкой костной лунки использовали неорганический костный трансплантат (Bio-Oss, Geistlich Pharma). На финальном этапе пациентке зафиксировали формирователи десен (фото 9-10) и установили временный съемный протез. После установки имплантатов проводили дополнительную процедуру КЛКТ-сканирования, и сравнивали запланированное положение винтов с полученным (фото 11).
Фото 7. Вид зубов пациента до лечения.
Фото 8. Рентгенограмма области проблемных зубов.
Фото 9. Головки "Smart pegs” были установлены для регистрации траектории позиционирования имплантатов.
Фото 10. Установка формирователей десен после аугментации области имплантации посредством аллогенного трансплантата.
Фото 11. Сравнение запланированной и достигнутой позиций имплантатов.
Результаты анализа были следующими: отклонения точки введения от начальной позиции в области зуба №8 составляло 0,13 мм, а в области зуба № 9 – 0,41 мм; угловая девиация достигала 4,3 градуса в области зуба № 8 и 6,76 градуса в области зуба № 9; отклонение показателей глубины установки имплантата отличалось от запланированного на 1,10 мм в области зуба № 8 и на 1,37 мм в области зуба № 9. Через 3 месяца после достижения осстеоинтеграции имплантатов были зафиксированы новые временные конструкции для формирования адекватного профиля мягких тканей. Окончательные протетические конструкции устанавливали через 6 месяцев после установки имплантатов (фото 12).
Фото 12. Вид после фиксации окончательных реставраций.
Обсуждение
Технологии визуализации плотно внедрились в имплантологическую отрасль, и привели к повышению точности установки дентальных имплантатов, а значит – и к повышению прогнозируемости общих результатов лечения. Проведенный систематический обзор показал, что использование статических направляющих шаблонов, изготовленных по предварительно полученным КТ-данным, провоцирует отклонения позиции титановых опор во время установки в среднем на 1 мм и не более чем на 5 градусов относительно запланированного положения. Однако данные другого систематического обзора указывают на гораздо больший уровень отклонений – до 7,5 мм в области точки введения имплантата и отклонение более чем на 15° от спланированных параметров ангуляции. Применение статических направляющих шаблонов, несмотря на все преимущества, чревато вероятностью развития ошибок на этапах планирования и реализации ятрогенных вмешательств. В условиях ограниченного открывания рта и при небольших размерах дефектов в структуре зубного ряда возможности для использования стереолитографических шаблонов также являются ограниченными. Подобные ограничения легко компенсировать при реализации принципов динамического навигационного контроля. Большинство ошибок в случаях применения статических шаблонов «всплывают» уже на этапе протезирования. Это и не странно, ведь такие шаблоны учитывают лишь необходимую позицию имплантата, но не ориентацию будущей протетической реставрации. Динамическая навигация в реальном времени позволяет определить точность проведения процедур остеотомии и установки дентального имплантата. Учитывая непосредственный характер контроля, врач может модифицировать протокол вмешательства прямо во время проведения манипуляции. Ведь динамическая навигация никоим образом не ограничивает возможности для визуализации рабочего поля, и, если в ходе операции определенные условия исключают возможность достижения запланированной позиции имплантата, то таковую можно тут же несколько изменить и адаптировать к существующим ограничениям.
В описанном выше клиническом случае, когда авторы данной статьи только обучались протоколу работы с динамической навигацией в ходе хирургического вмешательства, отклонения от запланированной позиции имплантатов составляли 0,13 мм и 0,41 мм по длине и 4,3 и 6,76 градусов по ангуляции в области зубов №8 и №9 соответственно.
Block и коллеги утверждают, что динамическая навигация позволяет добиться более точного позиционирования имплантатов по сравнению с обычными стереолитографическими шаблонами, но для достижения клинически более эффективных результатов врачу нужно выполнить не менее 20 установок имплантатов по вышеописанному алгоритму. Такого количества клинических случаев вполне достаточно для определенного уровня мастерства, который в дальнейшем будет только совершенствоваться. Интересно, что в других медицинских отраслях для того, чтобы улучшить свой клинический опыт врачу требуется провести ту же манипуляцию как минимум 60, а то и 500 раз, в зависимости от сложности работы с новыми технологиями. Как и в случаях со статическими шаблонами, точность и эффективность применения принципов динамической навигации напрямую зависит от полноты планирования операции и объема предварительного опыта врача.
В недавней публикации Stefanelli и коллег были представлены данные о результатах установки 231 имплантата в области резидуальных костных гребней без сепарации лоскутов или же при минимальном их смещении с использованием принципов динамической навигации. Все манипуляции проводились одним хирургом, из 89 прооперированных челюстей 28 были полностью беззубыми. Средний показатель отклонения положения имплантатов от предварительно спланированного составлял 0,71 (0,40) мм относительно точки введения (в латеральном направлении), и около 1 (0,49) мм относительно глубины введения винта. Средний показатель отклонения в градусах составлял 1,62-2,26 градусов. Точность позиционирования имплантатов у пациентов с частичной адентией при использовании статических шаблонов была практически такой же. Статически доказуемой разницы в отклонениях при позиционировании имплантатов в разных секстантах челюсти обнаружено не было. Но что самое интересное, точность установки имплантата со временем использования навигационной системы прогрессивно повышалась, и при анализе уже последних 50 установленных винтов уровни девиации положения составляли 0,59-0,85 мм и 1,98 градусов, в то время как при установке первых 50 опор данные показатели составляли 0,94-1,19 мм и 3,48 градуса.
Хотя в данной статье описан опыт применения фидуциарного маркера и термопластичного стента, в будущем динамическую навигацию по положению имплантата планируется проводить при помощи технологии трековой регистрации (ТР) с картированием. ТР позволяет использовать зубы пациента или уже установленные дентальные имплантаты как собственные фидуциарные маркеры для их интеграции в структуру полученных КЛКТ-изображений. Таким образом удастся избежать необходимости использования термопластического стента или специального КЛКТ-сканирования с искусственным специально адаптированным металлическим маркером. Диагностическая КЛКТ-визуализация может использоваться не только для планирования вмешательства и навигации во время его выполнения, но также и для оптимизации процесса документооборота пациентов. Проблемой остается трекер челюсти, который должен регистрировать ее положение во время операции, а значит постоянно должен быть зафиксирован поблизости к области вмешательства. Учитывая, что верхняя челюсть является неподвижной, маркер для регистрации ее положения можно внедрить в структуру специальных очков, которые, находясь в области переносицы, позволяют точно определить позицию челюсти относительно черепа, и тут же передавать ее в программное обеспечение. Проблемной остается нижняя челюсть: учитывая ее подвижность, маркер-трекер нужно фиксировать у самой челюсти или к отдельным нижним зубам. Технология ТР позволит использовать с этой целью трекер, прикрепленный гибкой проволокой из нержавеющей стали и композитным материалом непосредственно к зубам пациента.
Таким образом, протокол навигационной хирургии станет настолько простым, что начнет все больше внедряться в ежедневную клиническую практику. Несмотря на то, что динамическая навигация в имплантологии только начинает развиваться, она уже характеризуется набором преимуществ по сравнению с использованием обычных статических направляющих шаблонов. В процессе будущих контролированных и рандомизированных исследований удастся более детально уточнить все параметры эффективности навигационной имплантологической хирургии. Кроме того, применение принципов динамической навигации также позволяет расширить базу медико-правовой документации врача, и модифицировать лечение в сторону протетически направленного подхода. Все это обеспечивается за счет возможности системы записывать и сохранять данные процесса имплантации в форме фото и видеофайлов. Несмотря на это, применение новых технологий не исключает необходимости реализации базовых биологических принципов в имплантологии с учетом специфики процесса осстеоинтеграции имплантатов и заживления мягких и твердых тканей после хирургического вмешательства.
Заключение
Многие факторы способствуют повышению успешности результатов имплантации, и среди них достижение необходимой трехмерной позиции имплантата является одним из наиболее ключевых. Динамическая навигация является инновационным подходом, который базируется на использовании КЛКТ-данных и обеспечивает возможности для контроля точности позиционирования внутрикостной титановой опоры в реальном времени, при котором врач может адаптировать хирургической протокол с учетом особенностей каждой отдельной клинической ситуации.
Авторы:
George A. Mandelaris, DDS, MS
Luigi V. Stefanelli, DDS, PhD
Bradley S. DeGroot, DDS, MS





Читайте также:





Статьи от брендов


























































































































































{kind=link}
{kind=link}
0 комментариев